Ahora los robots ya pueden ayudar a las personas con discapacidad a vestirse, y así funcionan

MIT CSAIL
Este robot es capaz de ayudar a las personas con discapacidad o con movilidad limitada.
Los robots han venido para quedarse, para hacernos la vida mucho más fácil y no para quitarnos los puestos de trabajo, y es que la tecnología debe ser puesta al servicio del ser humano, algo que nos puede facilitar llegar mucho más lejos en cada una de nuestras metas y objetivos.
Así que es muy interesante el proyecto de los investigadores del Laboratorio de Ciencias de la Computación e Inteligencia Artificial (CSAIL) del MIT que han logrado desarrollar un nuevo algoritmo que hace que el movimiento del robot sea seguro para los humanos.
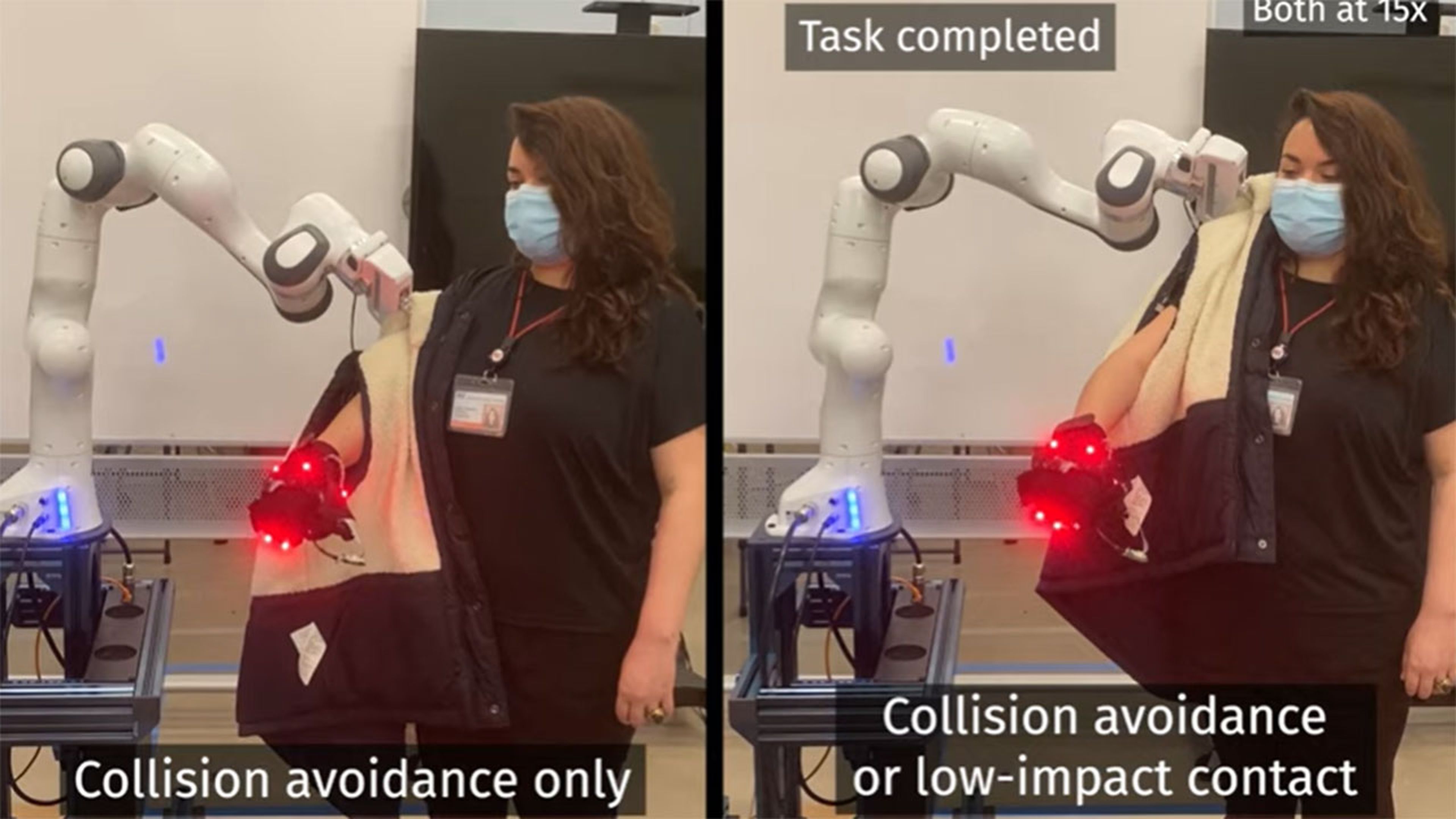
El concreto quieren dirigir este algoritmo para ayudar a las personas con movilidad reducida a vestirse. Se trata de una tarea compleja hasta ahora solo realizada por un ser humano dado que requiere agilidad y seguridad para el usuario objetivo, y eso sin afectar a la eficiencia de la tarea correspondiente.
Han podido mostrar como este robot del MIT pudo vestir a personas incluso cuando estaban realizando otras acciones como hablar por teléfono. Se trata de un avance muy interesante, porque puede ser la herramienta ideal para ampliar la asistencia para personas con discapacidad o movilidad limitada.
En lugar de tener un único modelo predeterminado en el que el robot solo comprenda una reacción potencial, el MIT le dio a la máquina una comprensión de muchos modelos posibles para imitar más de cerca como un humano puede entender a otros humanos. Así que a medida que el robot recopila datos, reduce la incertidumbre y perfecciona cada uno de sus movimientos.
MIT CSAIL
Esto quiere decir, que si una persona mientras está siendo vestida por un robot, cambia de postura, levanta la mano o incluso se gira, el robot podría reaccionar a los cambios al momento seleccionando un modelo que se adapte a la situación.
“Este enfoque multifacético combina teoría de conjuntos, restricciones de seguridad conscientes de los humanos, predicción del movimiento humano y control de retroalimentación para una interacción segura entre humanos y robots”, afirma el profesor asistente en el Instituto de Robótica de la Universidad Carnegie Mellon, Zackory Erickson.
Otros artículos interesantes:
Descubre más sobre David Hernández, autor/a de este artículo.
Conoce cómo trabajamos en Computerhoy.