Ahora ya los robots son capaces de subir y bajar escaleras, y sin apoyo visual

Universidad Estatal de Oregón
Este robot es capaz de, no solo subir y bajar escaleras sin ningún tipo de apoyo visual, sino también pasar por cualquier terreno desconocido.
La mayoría de los robots que se están fabricando hoy día están dirigidos a tareas de rescate y exploración, y cuentan con distintas cámaras a modo de visión que les permiten leer el terreno para no cometer un paso en falso.
Sin embargo, estos sensores de cámara son muy sensibles, y un pequeño golpe o accidente podría dejarlos totalmente inoperativos, haciendo que el robot ya no pueda desenvolverse por sí mismo.
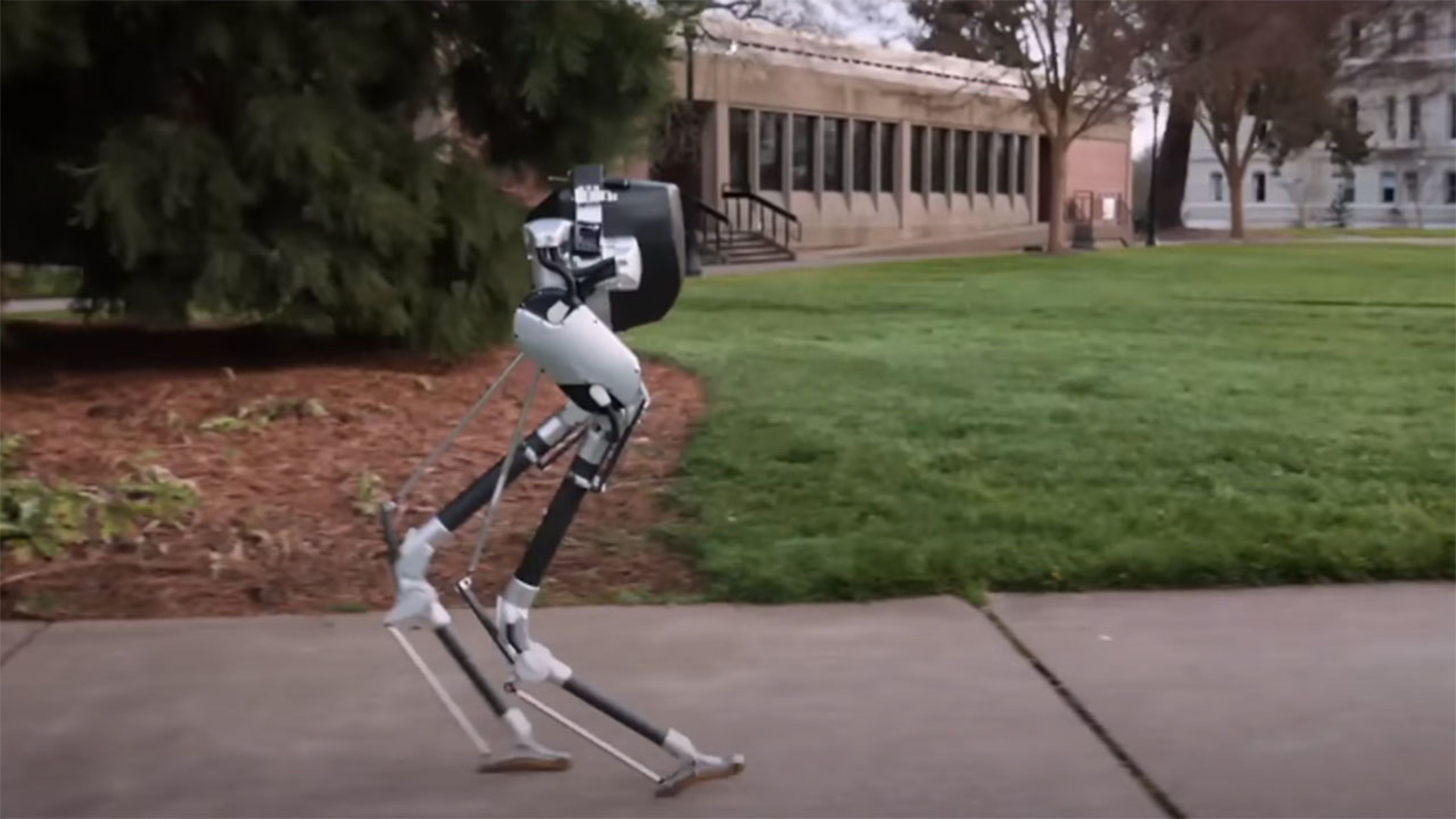
Es por ello que ahora investigadores de la Universidad Estatal de Oregónhan conseguido que un robot bípedo sin apoyo visual sea capaz de subir y bajar escaleras. Este robot, de nombre Cassie de Agility Robotics, lo han entrenado previamente en un simulador virtual.
Para conseguir su objetivo, los investigadores utilizaron una técnica llamada “aprendizaje por refuerzo de simulación real” para establecer cómo va a caminar el robot. Primero hicieron la fase de aciertos y errores bajo un simulador para no estropear el robot, y después enseñaron al mismo virtualmente a manejar una serie de situaciones, incluidas subir escaleras o todo tipo de terreno.
Cuando el robot superó el entrenamiento simulado lo llevaron por el campus universitario para subir y bajar escaleras y diferentes tipos de terreno. Tras las pruebas, fue capaz de sortear con éxito hasta bordillos, troncos y terrenos irregulares.
Universidad Estatal de Oregón
No obstante, en las escaleras los investigadores hicieron 10 ensayos subiendo y otros 10 ensayos bajando por las mismas, con un 80 % y 100 % de eficacia, respectivamente.
Una de las principales dificultades a las que se enfrentaron el equipo de investigaciones era cuando el robot iba demasiado rápido o demasiado lento, lo que le hacía fallar en este tipo de operaciones de subida y bajada de escaleras o de terreno.
Otros artículos interesantes:
Descubre más sobre David Hernández, autor/a de este artículo.
Conoce cómo trabajamos en Computerhoy.