Crean un robot inspirado en origami que transforma sus dedos para agarrar cualquier cosa
Si bien hay multitud de robots en el mercado, lo cierto es que muy pocos son capaces de adaptarse a los millones y millones de objetos con los que pueden entrar en contacto, pero un reciente avance podría cambiarlo todo.
Investigadores han sido capaces de fabricar un nuevo robot que es capaz de cambiar de forma en tres configuraciones únicas, lo que le permite agarrar y levantar un amplio espectro de objetos de formas extrañas. El invento fue presentado en la Conferencia Internacional IEEE 2020 sobre ciencia de la automatización. Y es que un robot debe ir adaptando su agarre para lograr estrategias de manipulación utilizando las distintas formas de los objetos y el entorno que está a su alrededor. Y es por ello que la mayoría de las estructuras de mano robótica son tan limitadas, incapaces de manejar una serie de objetos.
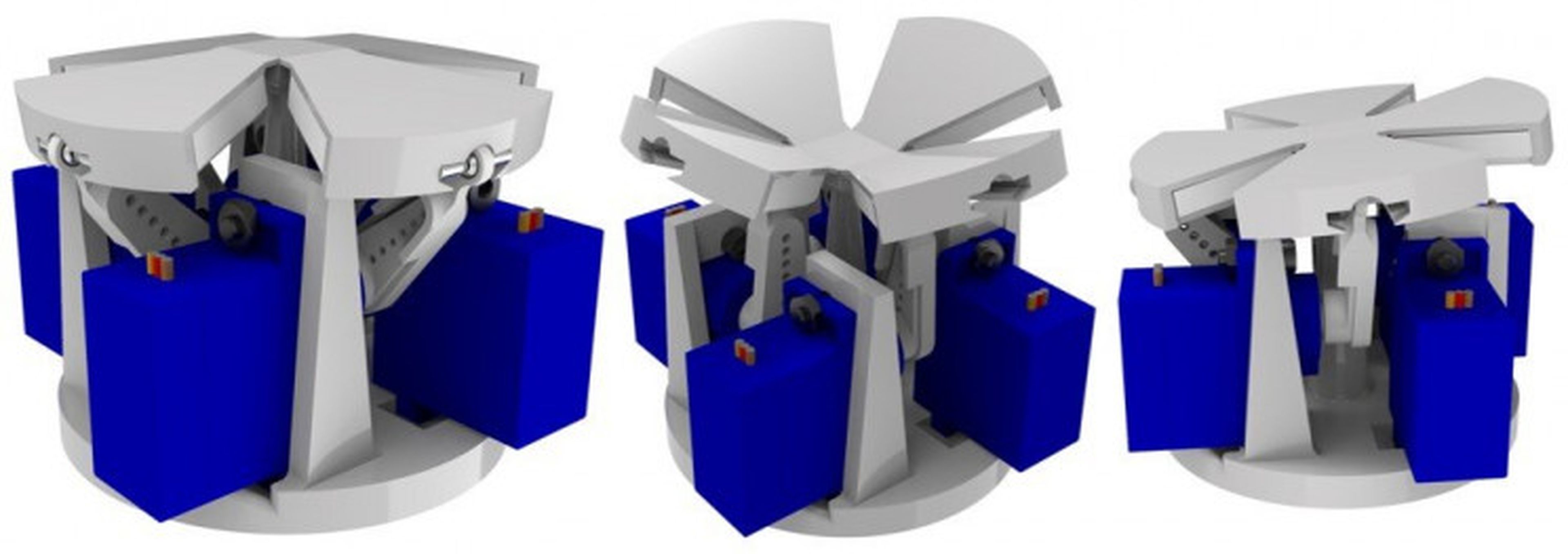
Ahora investigadores de la Universidad de Ciencia y Tecnología de Hong Kong han creado una especie de mano robótica con distintos elementos que vienen a imitar los dedos, haciendo uso de un diseño que sigue el ejemplo del arte japonés del plegado de papel, el origami.
En concreto las pinzas robóticas que han desarrollado son capaces de agarrar cientos de objetos diferentes, independientemente de su forma. El primer objetivo que tuvo el equipo de desarrollo fue crear dedos robots de fácil control, que fueran capaces de realizar muchas cosas y actuar sin problemas.
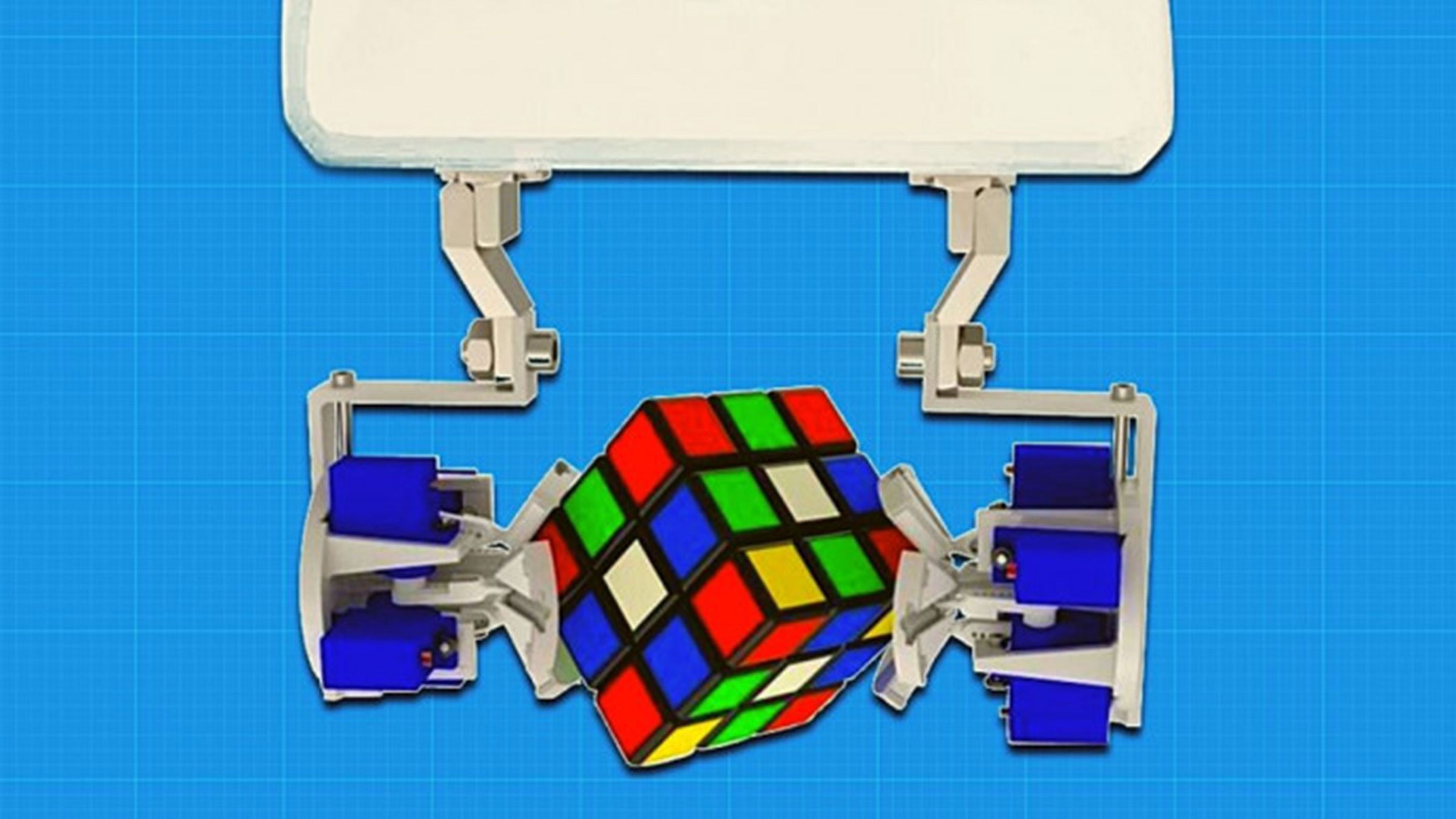
A diferencia de otras pinzas robótica sensibles, las que han inventado ahora se basan en el origami presentando componentes como un esqueleto de origami suave que funciona como la superficie de transformación de las yemas del dedo, y también uniones de cuatro barras impulsadas por motor, que funcionan como mecanismo de transmisión y actuación.
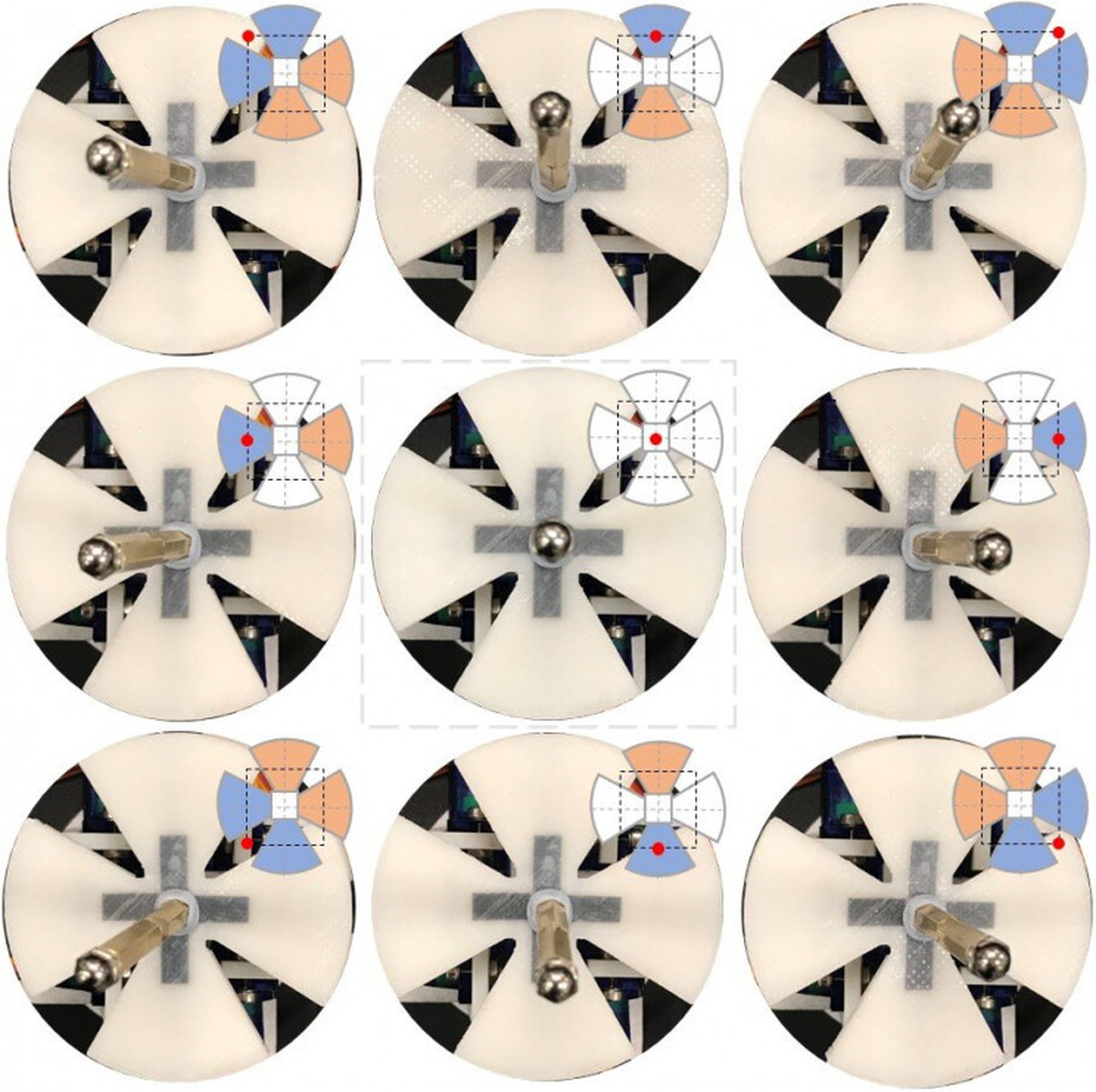
Los investigadores, para crear estos dedos robóticos, instalaron una bolita en el centro de la yema del dedo para permitir la rotación libre en tres dimensiones, e igualmente unos servomotores para controlar de forma independiente las facetas de las cuatro hojas situadas en el esqueleto de origami.
“Con las combinaciones de diferentes poses en cada faceta, se pueden lograr muchas configuraciones para distintos modos de agarre como el modo convexo, modo cóncavo y modo plano inclinado”, han señalado los investigadores.
[Vía: InterestingEngineering]
Descubre más sobre David Hernández, autor/a de este artículo.
Conoce cómo trabajamos en Computerhoy.