Este robot inspirado en un cangrejo topo puede excavar en casi cualquier superficie
Universidad de Berkeley
Este robot escarabajo es capaz de medir la calidad del suelo, e incluso de recopilar datos marinos y de sitios de excavación.
Hasta ahora el ser humano ha creado multitud de robots basados en inteligencia artificial utilizando siempre la última tecnología, a veces incluso pareciendo que estábamos viendo un producto sacado de una mismísima película de ciencia ficción.
Y si bien contamos con muchísimos robots dedicados a tareas de medicina, ocio y cadenas de montaje, lo cierto es que hasta ahora la tecnología de los robots dirigidos al entorno del suelo no son precisamente numerosos, y ahora hay en marcha una nueva tecnología dirigida al suelo que podría facilitar mucho la vida a los agricultores.
Y como si fuera de ciencia ficción, un conjunto de investigadores de la Universidad de Berkeley han presentadoun robot inspirado en el cangrejo topo del Pacífico capaz de evaluar el suelo de los sitios agrícolas, pero también recopilar datos marinos y estudiar las condiciones del suelo de las rocas en los sitios de construcción.
Llamado EMBUR (EMerita BUrrowing Robot), se trata de un robot de excavación que se caracteriza por contar con un diseño de patas capaz de lograr un movimiento hacia abajo que emula la forma en que los cangrejos topo del Pacífico se entierran en la arena de la playa.
Universidad de Berkeley
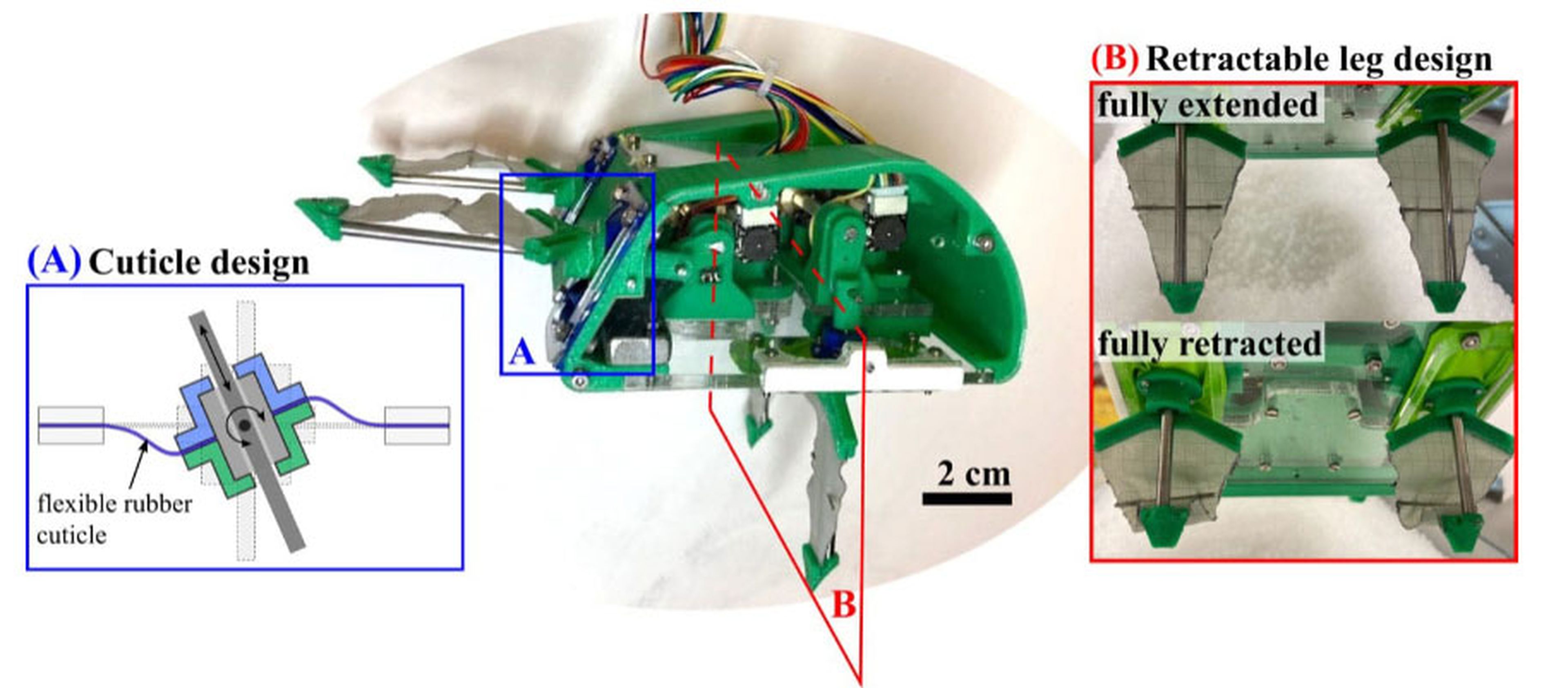
Lograron diseñar las patas de estos robots para contar con una respuesta de fuerza anisotrópica pudiendo hacer que experimentaran una fuerza mucho mayor en una dirección que en otra.
“Ha habido algunos avances recientes en la creación de patas anisotrópicas para medios granulares, pero esta es la primera vez que se implementan con éxito en un robot de excavación libre”, señala Laura Trees, autora principal del estudio.
Una de las dificultades es que los pequeños granos de arena puedan entrar en los mecanismos del robot: “creamos una cutícula que es análoga a la membrana artrodial que se encuentra en los cangrejos topo. Es un material suave y flexible que recubre las aberturas de las juntas para evitar que entren granos, pero aún así permite el libre movimiento”.
Observando a los escarabajos topos reales para su robot
Así que para diseñar las patas de este robot, primero los investigadores observaron a los escarabajos topo en un laboratorio dándose cuenta que los cinco pares de patas podrían dividirse en dos grupos que varían en direcciones opuestas entre sí. Así que intentaron reproducir estas características en el diseño de las patas del robot.
“Utilizamos una técnica de modelado conocida como teoría de las fuerzas resistivas para modelar las fuerzas experimentadas por las piernas patas a lo largo de sus trayectorias de barrido. Esta tecnología nos ayuda a comprender los tipos de geometrías y comportamientos de los robots que permitirían la excavación más exitosa”, añade.
Así que a través de este robot demostraron que es posible excavar con patas verticales en medio secos como un primer paso para crear un sistema que pueda excavar en una amplia gama de condiciones y tipos de sustratos como la arena de la playa.
Estos robots con inteligencia artificial podrían utilizarse en variedad de industrias y campos de estudio, como la medición de la calidad del suelo para sitios agrícolas, pero también para la ingeniería geotécnica, recopilación de datos marinos, construcción y excavación.
Otros artículos interesantes:
Descubre más sobre David Hernández, autor/a de este artículo.
Conoce cómo trabajamos en Computerhoy.