Los robots ya están aprendiendo a agarrar todo tipo de objetos con la cantidad de fuerza adecuada
MITCSAIL
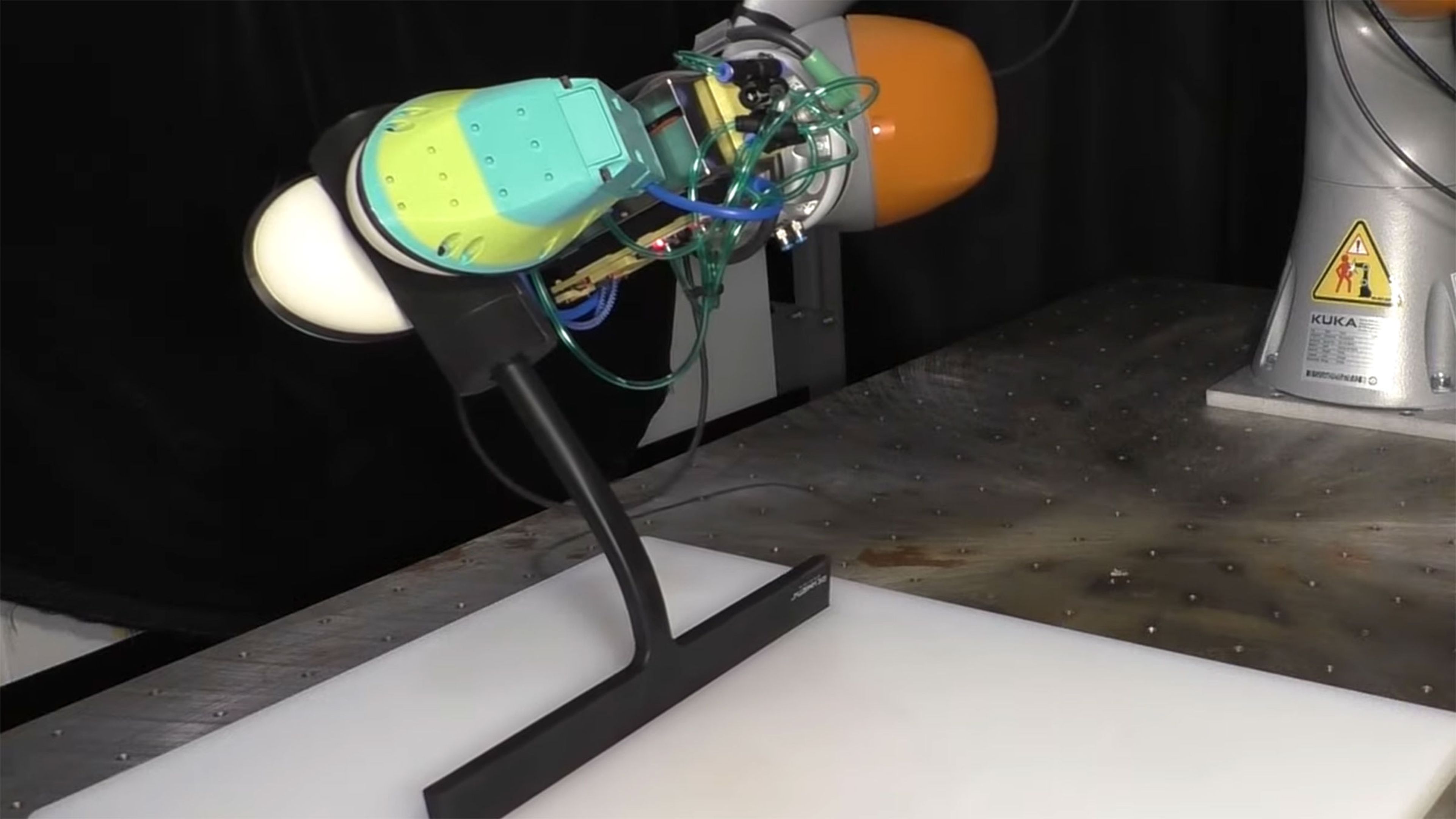
Este brazo robótico es capaz de aplicar la fuerza adecuada en distintos objetos para realizar una tarea.
Ya contamos con innumerables robots en la actualidad, muchos frente al público y otros en cadenas de montaje, basados en inteligencia artificial que básicamente van a marcar el futuro de nuestros trabajos tal como ha imaginado el ser humano en películas de ciencia ficción.
Y lo que también parece ciencia ficción es una nueva tecnología que van a llevar los robots del futuro, mediante la cual investigadores les están enseñando a poder agarrar herramientas con la cantidad adecuada de fuerza, y eso es un gran avance para los llamados robots blandos.
Y ahora los investigadores de Laboratorio de Ciencias de la Computación e Inteligencia Artificial CSAIL del MIT se han asociado con un grupo del Instituto de Investigación de Toyota para diseñar un sistema que enseña a los robots a agarrar todo tipo de herramientas y aplicar la cantidad adecuada de fuerza para realizar la tarea.
Este sistema llamado Efectores de extremos elásticos en serie (SEED) utiliza pinzas de burbujas blandas y cámaras integradas para mapear la deformación en las pinzas en el espacio 6D aplicando la fuerza adecuada a una herramienta en particular. Al tener 6 grados de libertad, la máquina podría moverlo hacia la izquierda, hacia la derecha, hacia arriba, hacia abajo, hacia adelante, hacia atrás y también incluso hacerlo girar.
Por otra parte la clave está en las pinzas de burbujas que hacen uso del algoritmo de aprendizaje de inteligencia artificial para ejercer con precisión la cantidad correcta de fuerza en cualquier objeto.
Por otra parte el controlador de circuito cerrado utiliza SEED y retroalimentación visuotáctil para ajustar la posición del brazo del robot a fin de aplicar la fuerza deseada.
El modelo aprendido se obtiene utilizando la experiencia previa del robot usando un sensor de par de fuerza que determina la rigidez de los sujetadores de burbujas. Una vez que el robot detecte la fuerza, la compara con la fuerza que el usuario está ordenando y luego se movería a la dirección para aumentar la fuerza, todo en un espacio de 6D.
Uso de esta tecnología de futuro
Entre las tareas que ha podido realizar este primer brazo robótico con esta nueva tecnología de agarre es limpiar líquido o usar un bolígrafo para escribir una palabra.
Sin embargo todavía tiene este sistema muchas limitaciones, sobre todo cuando el robot se encuentra con nuevos tipos de formas.
Es por ello que los investigadores están trabajando para generalizar el marco de diferentes formas para que pueda manejar herramientas arbitrarias en el mundo real.
Otros artículos interesantes:
Descubre más sobre David Hernández, autor/a de este artículo.
Conoce cómo trabajamos en Computerhoy.