Enseñan sentido común a los robots
MIT
- Con este avance, es probable que en un futuro los robots puedan realizar cualquier tipo de tarea doméstica, aunque sea muy compleja.
- Los robots podrían autocorregir sus propios errores, para que no tengan que comenzar la tarea desde el principio.
Hoy día son muchas las tecnologías y propuestas que están permitiendo entrenar a los robots para que realicen distintas tareas domésticas, incluso las complejas.
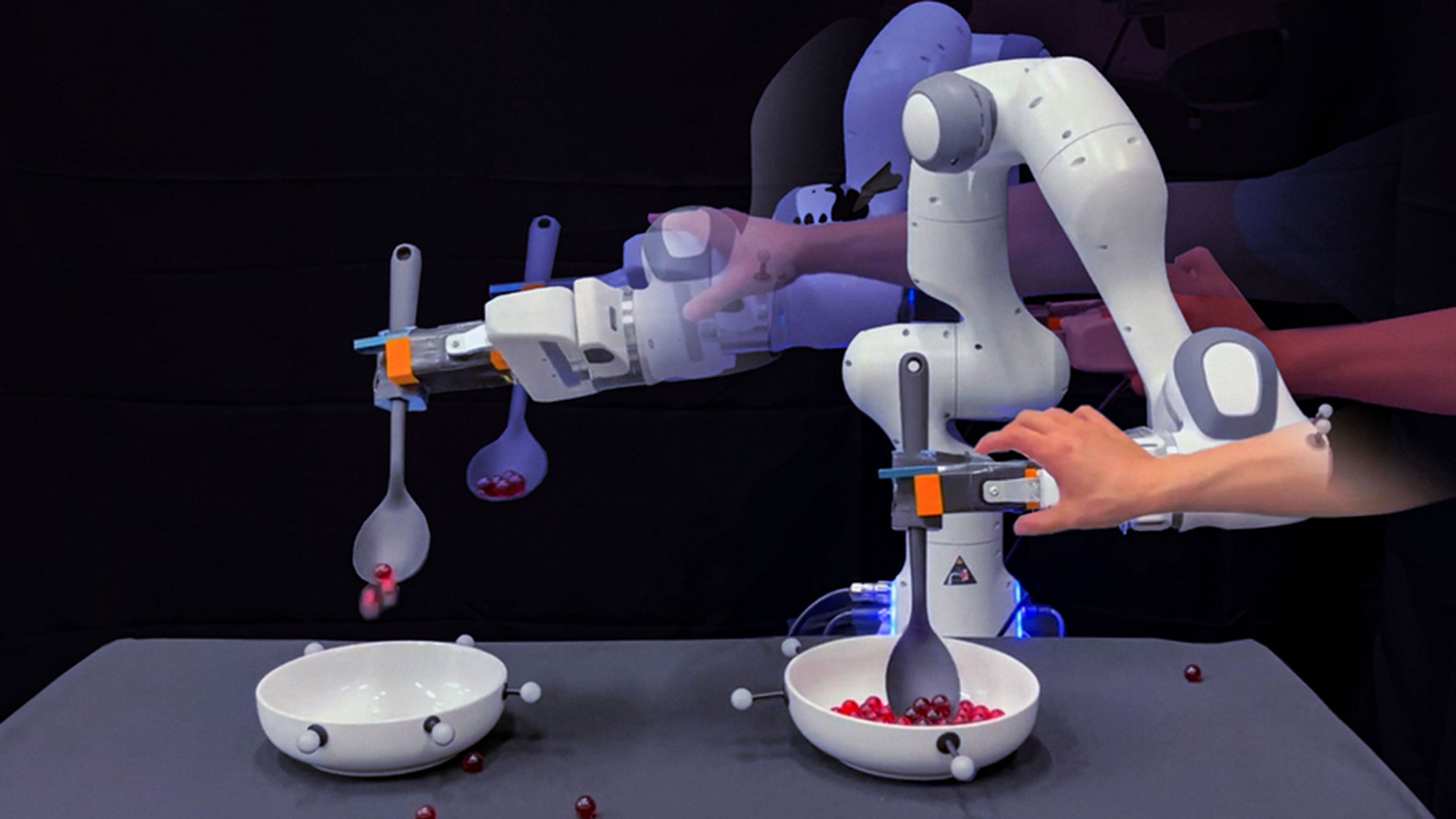
Hasta ahora, este aprendizaje suele realizarse a través de la imitación, es decir, copiando los movimientos realizados previamente por un humano.
Pero los ingenieros del MIT quieren ir mucho más lejos enseñando a los robots conocimientos de sentido común para que puedan afrontar situaciones inesperadas cuando estén realizando sus tareas.
Por eso han creado un nuevo método que conecta los datos de movimiento del robot con grandes modelos de lenguaje que pueden proporcionar contexto valioso a la máquina.
Con esto se podrían dividir tareas complejas de los robots en otras subtareas más pequeñas, lo que le permitiría al robot adaptarse a las interrupciones sin tener que empezar desde cero.
“El aprendizaje por imitación es un enfoque generalizado que permite la creación de robots domésticos. Pero supongamos que un robot imita ciegamente las trayectorias de movimiento de un ser humano. En ese caso, se pueden acumular pequeños errores y eventualmente descarrilar el resto de la ejecución”, afirma Yanwei Wang, estudiante de posgrado en el Departamento de Ingeniería Eléctrica y Ciencias de la Computación (EECS) del MIT.
"Con nuestro método, un robot puede autocorregir errores de ejecución y mejorar el éxito general de la tarea".
El hecho de que los robots puedan realizar tareas dentro de subtareas, les permitiría autocorregirse al momento, por lo que no tendrían que empezar desde el principio si cometen un error.
Descubrieron los científicos que los grandes modelos de lenguaje LLM pueden automatizar algunas tareas y se les puede pedir que produzcan una lista de subtareas que estarían involucradas en una tarea determinada.
“Los LLM tienen una manera de indicarle cómo realizar cada paso de una tarea en lenguaje natural. La demostración continua de un ser humano es la encarnación de esos pasos en el espacio físico”, dice Wang.
"Y queríamos conectar los dos para que un robot supiera automáticamente en qué etapa se encuentra una tarea y pudiera replanificar y recuperarse por sí solo".
“Con nuestro método, cuando el robot comete errores, no necesitamos pedirle a los humanos que programen o que den demostraciones adicionales de cómo recuperarse de fallos", dice Wang .
“Eso es muy emocionante porque ahora hay un gran esfuerzo para entrenar robots domésticos con datos recopilados en sistemas de teleoperación. Nuestro algoritmo ahora puede convertir esos datos de entrenamiento en un comportamiento de robot robusto que puede realizar tareas complejas a pesar de las perturbaciones externas”.
Otros artículos interesantes:
Descubre más sobre David Hernández, autor/a de este artículo.
Conoce cómo trabajamos en Computerhoy.