Esta especie de perro robot sigue funcionando por sí solo una vez que se ha puesto en marcha
EPFL
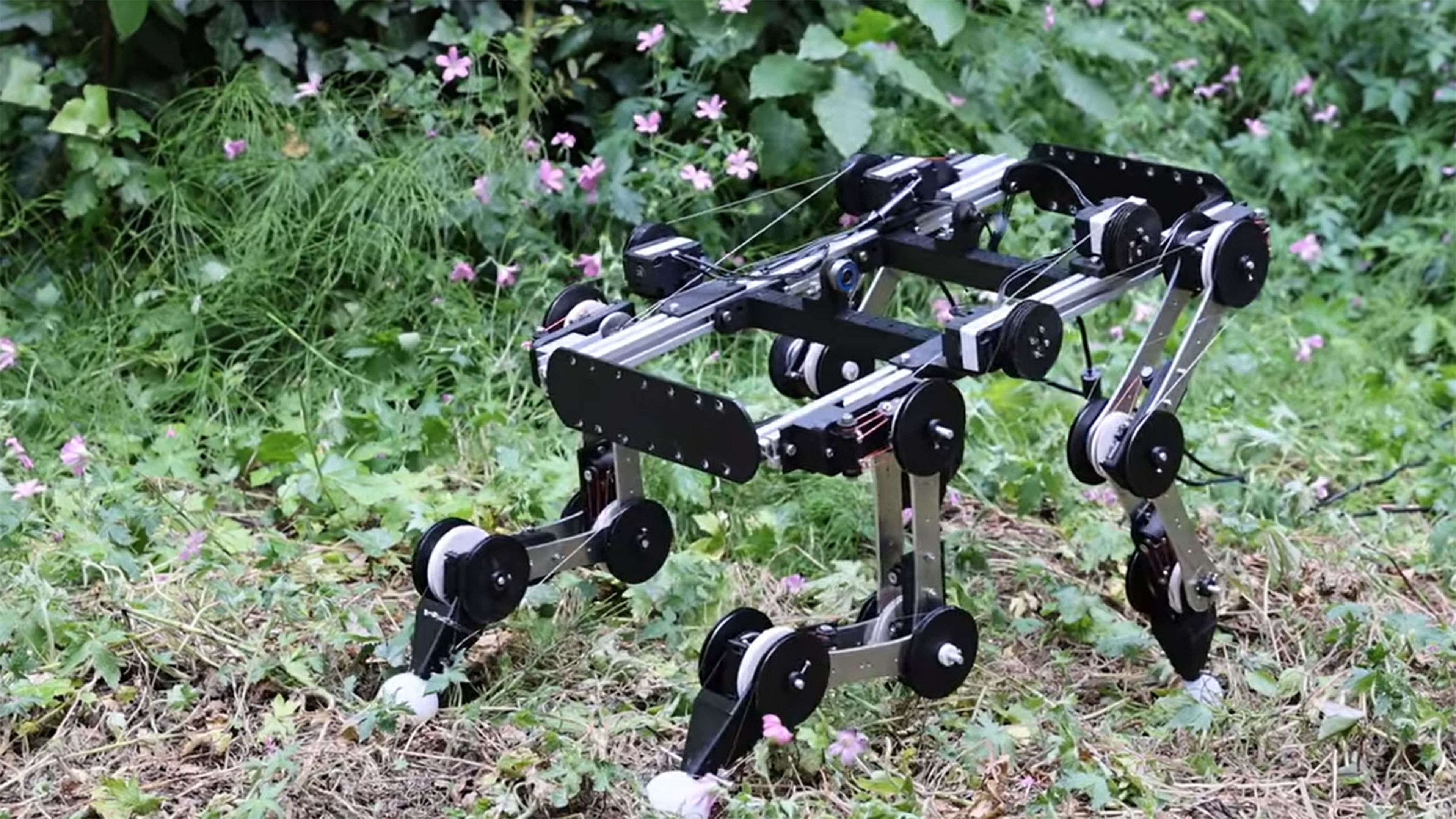
El peculiar perro robótico capaz de funcionar sin motores y que sorprende por sus movimientos realistas, como si fuera un animal de verdad.
Tenemos multitud de prototipos de perros robóticos en el mercado, pero la mayoría requieren de motores de control para mantenerse andando o corriendo.
Sin embargo, ahora un investigador ha sido capaz de crear un perro robótico que sigue funcionando por sí solo una vez que se ha puesto en marcha.
Ha sido creado por el estudiante de robótica Mickaël Achkar en el instituto de investigación EPFL de Suiza.
Para crear el robot se basó en datos de captura de movimiento de perros reales corriendo. Luego usó una técnica llamada “análisis de componentes principales”, agrupando los datos en múltiples vectores que describían los ejes del movimiento del perro.
Se trata de un perro robot bilateralmente simétrico, que cuenta con varias varillas de metal para los huesos, poleas de polímero impresos en 3D para las articulaciones y cables de acero para los tendones.
Cada una de sus patas tiene tres articulaciones como los perros reales y cada una de las cuales se coordinada de forma mecánica con las demás.
Así probaron sus movimientos
Primero probaron el perro robot en una cinta de correr motorizada, y se sorprendieron al ver que una vez que el robot había comenzado a correr, el movimiento de la cinta era todo lo que se necesitaba para seguir realizando el movimiento.
Si bien el robot ya contaba con motores que en principio debían utilizarse para mover cada pata, en la prueba no hacían falta activarse para que el robot hiciera el movimiento.
Evidentemente, el perro usará estos motores para hacer otros movimientos como puede ser saltar o sortear obstáculos.
“Nuestro objetivo no es competir con perros robóticos de ultra alta tecnología, sino explorar diseños de robots bioinspirados. Esto implica perfeccionar el diseño fundamental de un robot y modificar sus propiedades pasivas para que sólo se necesiten sistemas de control simples, y al mismo tiempo maximizar las capacidades del robot. Lo que hemos hecho aquí ya ha demostrado ser útil para crear manos robóticas y otras partes del cuerpo”, concluye.
Otros artículos interesantes:
Descubre más sobre David Hernández, autor/a de este artículo.
Conoce cómo trabajamos en Computerhoy.